
車載攝像頭被譽為是車輛感知物理世界的“眼睛”,是實現自動駕駛的核心感知傳感器。隨著360環視、車道保持輔助(LKA)、行人AEB、駕駛員監控系統(DMS)等功能滲透率的提升,單車攝像頭平均搭載數量逐漸增加,車載攝像頭的市場規模也越來越大。根據相關統計數據顯示,2022年中國乘用車市場單車攝像頭平均搭載數量為3.0顆;2023年第一季度,攝像頭平均搭載數量為3.3顆,同比增加0.5顆。

據CINNO Research預測,2023年,國內乘用車市場攝像頭搭載量將進一步提升至7200萬顆,到2025年,這一數字將超過1億顆,2023~2025年的年復合增長率為17%。
高分辨率、去ISP化、高動態范圍以及高感光靈敏度等將成為車載攝像頭技術發展的主線。車載攝像頭的技術迭代又進一步加強了其在感知傳感器中的核心地位,產品價值和應用場景也將被進一步擴大。
在此背景下,焉知汽車推出《車載攝像頭產業分析報告》,從車載攝像頭基礎解析、車載攝像頭產業鏈分析、車載攝像頭應用趨勢、車載攝像頭行業競爭格局、國內車載攝像頭重點企業及產品布局等方面入手,綜合分析車載攝像頭的產業鏈發展現狀及未來應用趨勢,為行業研究和企業發展提供參考。
由于時間倉促,報告中難免會有疏漏和不足之處,敬請各位專家、同行、讀者批評指正。
1.車載攝像頭基礎解析
1.1車載攝像頭基本定義與硬件構成
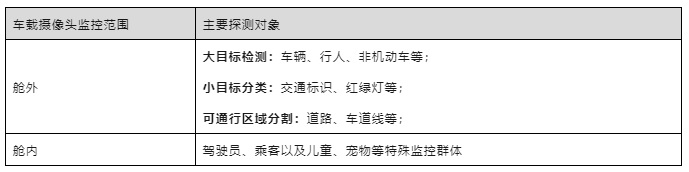
基本定義:是指安裝在汽車的內部或外部,作為核心感知傳感器,通過鏡頭和圖像傳感器實現圖像信息的實時采集,用于監控車輛內外環境以輔助駕駛員安全行駛。
圖表1. 車載攝像頭核心監測目標
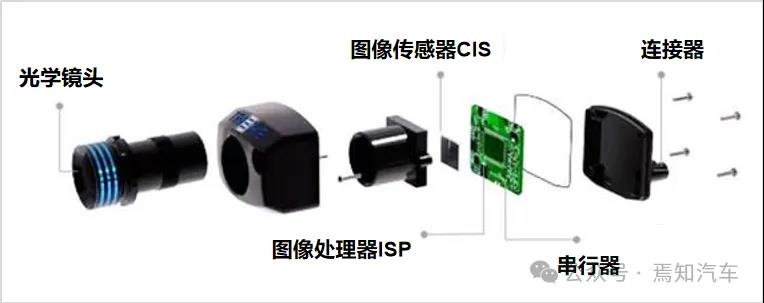
硬件構成:車載攝像頭模組主要包括光學鏡頭、圖像傳感器CIS、圖像信號處理器 ISP、串行器和連接器等元器件。
圖表2. 車載攝像頭基本結構構成(信息來源:安森美)
1)鏡頭:由光學鏡片、濾光片、保護膜等組成。鏡頭負責聚焦光線,將視野中的物體投射到成像介質表面,進而生成光學圖像。通常情況下來講,攝像頭70% 的光學參數由鏡頭決定。
鏡頭一般是由多片光學鏡片組成,光學鏡片的材質主要有塑膠(P)和玻璃(G)。車載鏡頭目前主要用玻塑混合鏡頭和玻璃鏡頭兩大類型。其中環視、艙內攝像頭多采用玻塑混合鏡頭,前視、側視以及CMS攝像頭多采用全玻璃鏡頭。
2)圖像傳感器CIS:即成像介質,利用光電轉換元件將鏡頭投射到CIS表面上的光信號轉換為電信號。 常見的圖像傳感器主要分為 CCD 和 CMOS 兩種。
總體而言,CCD傳感器在靈敏度、圖像質量等方面優于CMOS傳感器。然而,CMOS傳感器在功耗、體積、成本等方面優于CCD傳感器。目前車載攝像頭的圖像傳感器普遍采用CMOS芯片。
3)圖像信號處理器 ISP:處理圖像傳感器CIS輸出的RAW格式數據,主要處理功能包括圖像縮放、自動曝光(AE)、自動白平衡(AWB)、自動對焦(AF)、圖像去噪等,最終轉換成RGB、YUV等格式數據。攝像頭模組內部的ISP存在兩種形式:A-內置在CMOS內部;B-獨立的芯片構成。
4)串行器:將并行信號轉換為串行信號。通常經過圖像傳感器CMOS或圖像處理器ISP處理后輸出的信號是基于MIPI /CSI標準,傳輸距離較短,因此需要轉換成適合長距離傳輸的串行信號,目前串行器常用的是美信的GMSL 2標準和TI的FPD-Link標準。
1.2車載攝像頭性能要求
1)重要參數指標
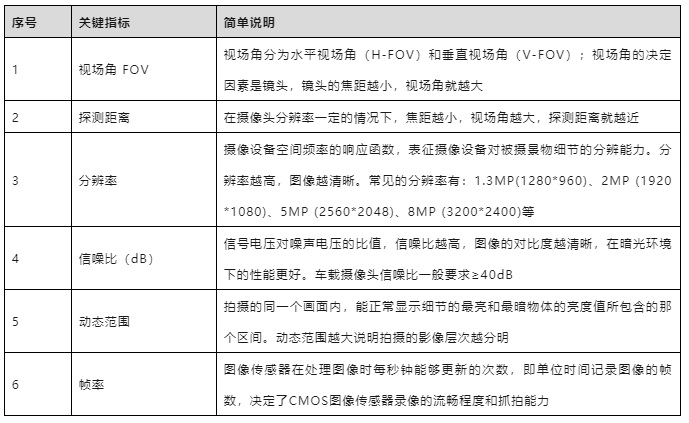
關于車載攝像頭,比較重要的幾個參數指標包括:視場角FOV、探測距離、分辨率、信噪比、幀率和動態范圍等。
圖表3. 車載攝像頭關鍵參考指標(信息來源:《QCT/T 1128 汽車用攝像頭》、公開資料整理)
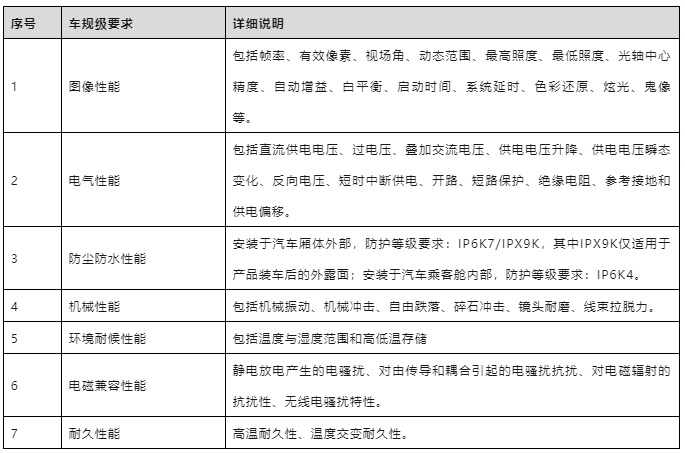
相較于消費類攝像頭,車載攝像頭的工作環境極度惡劣,會經歷振動、高溫、雨霧、低溫、光線變化劇烈等極端條件工況,因此車載攝像頭的車規級要求也比較嚴苛。目前,車載攝像頭的車規級測試的范圍包括圖像性能、電氣性能、防塵防水性能、機械性能、環境耐候性能、電磁兼容性能和耐久性等。
圖表4. 車載攝像頭車規級要求(信息來源:《QCT/T 1128 汽車用攝像頭》、公開資料整理)
1.3應用場景
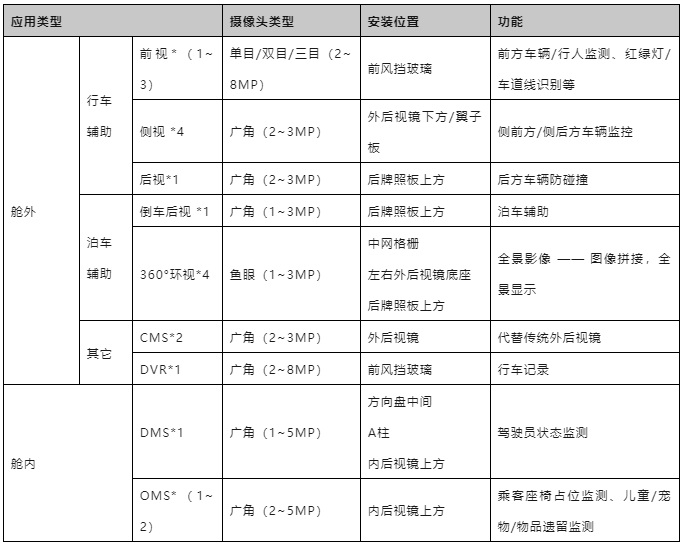
車載攝像頭的應用場景可分兩大類:艙外應用和艙內應用。艙外應用包括泊車輔助、行車輔助、CMS、DVR等應用;艙內應用包括DMS、OMS等應用。
圖表5. 車載攝像頭主要應用場景分析(信息來源:公開資料整理)
1.3.1艙外場景
1)行車ADAS場景
a.前視ADAS感知
前視解決方案大致可分為兩類:前視一體機和單純的攝像頭模組接入到獨立的控制器。用于實現的功能通常包括:前向碰撞預警FCW、行人防碰撞預警PCW、車道線偏離預警LDW、車道線保持輔助LKA、自動緊急制動AEB、自適應巡航ACC等。
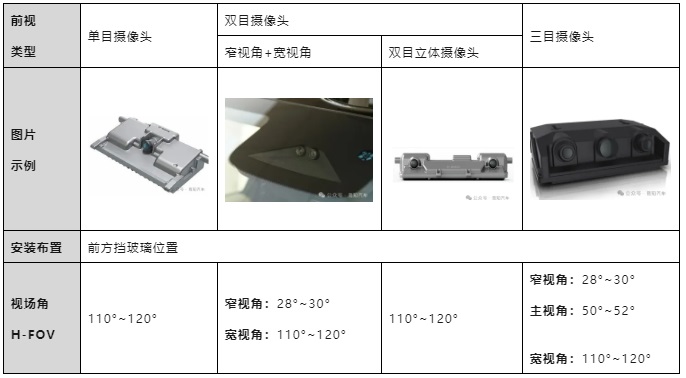
前視攝像頭分辨率通常在2~8MP ,一般布置在前風擋位置。根據鏡頭個數的不同,前視攝像頭又可分為:單目攝像頭、雙目攝像以及三目攝像頭。
其中,單目攝像頭主要應用于中低端車型,多采用前視一體機形式。雙目攝像頭又可細分成兩類:雙目立體攝像頭和兩個單目攝像頭(窄視角+寬視角)組合。三目攝像頭基本沒有一體機的形態,一般是由三個不同視場角攝像頭模組組合而成,數據要輸入到智駕域控制器進行處理。
圖表6. 前視攝像頭主要類型
b.側視ADAS感知
在高階智能駕駛感知解決方案中,除了配置角毫米雷達外,一般還配置有側視攝像頭,作為異構冗余的感知傳感器,主要用于在行車過程中側前方和側后方的目標物體監測。用于實現的功能包括盲點監測、橫穿車輛碰撞預警等。
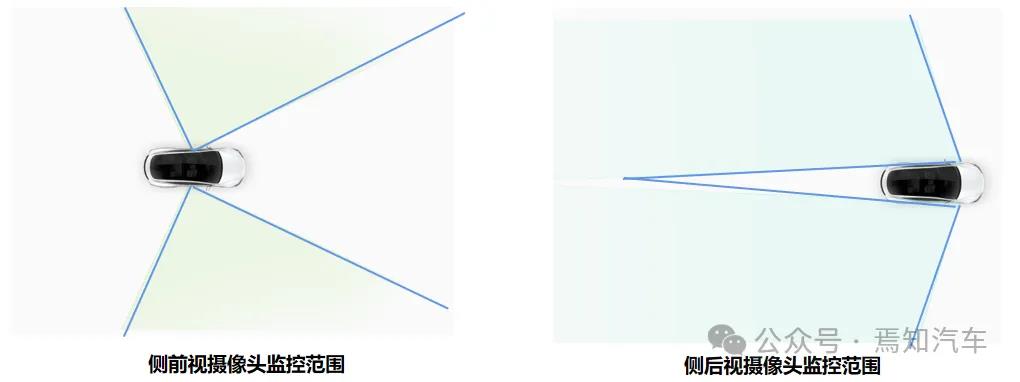
- 側前視攝像頭:視場角為90°~100°,最遠探測距離大于80m;通常安裝在B柱或外后視鏡,主要用于參與交通標志識別、監控側前向鄰近車道車輛、十字路口左右側車輛/行人監測等。
- 側后視攝像頭:視場角為90°~100°,最遠探測距離大于100m;通常安裝在車輛前翼子板,主要用于變道或匯入高速公路時側后方相鄰車道車輛的監控等。
圖表7. 側視攝像頭監控范圍(信息來源:特斯拉官網)
c.后視ADAS感知
區別于倒車后視攝像頭或環視中的后部攝像頭,該攝像頭為行車輔助攝像頭,它與側視以及前視攝像頭共同覆蓋360°的中長距離的行車視覺感知范圍。
行車后視攝像頭:視場角為100°~120°,探測距離需求為50m~80m,用于彌補側后視攝像頭在車輛正后方的視覺感知探測盲區。
2)泊車ADAS場景
a.倒車后視
在泊車場景下,車載攝像頭最開始是用于實現倒車影像功能,通過安裝在車輛尾部的攝像頭把車輛后方的場景顯示到座艙內的中控顯示屏上,輔助駕駛員安全泊車。
倒車攝像頭(RVC)通常為廣角攝像頭,水平視場角(H-FOV)一般在120°~140°左右,垂直視場角(V-FOV)一般≥130°,分辨率一般在1MP~3MP。當前,倒車后視攝像頭主要應用在一些低端車型上,在未來將會被環視攝像頭所取代。
b.360°全景環視
現階段,汽車上的視覺泊車輔助配置逐漸由倒車后視升級到360°全景環視,通過拼接算法對4顆環視攝像頭輸出的4個局部圖像進行拼接,然后,拼接好的鳥瞰圖會被傳輸到中控屏上進行顯示。除了用于成像,環視攝像頭也具備感知功能 —— 識別車身近距離范圍車道線、探測近距離的目標物體,并將感知到的信息傳輸給控制器,實現車道線偏離預警、移動物體監測和預警等功能。
環視攝像頭(SVC)通常采用魚眼攝像頭,水平視場角(V-FOV)≥170°,垂直視野(V-FOV)≥140°,分辨率一般在1MP~3MP。
3)其它場景
a.行車記錄儀
行車記錄儀攝像頭記錄汽車在行駛過程中的視頻和圖像。它不僅可用于娛樂——在行駛過程中拍攝風景,一旦發生交通事故,記錄的視頻信息還可以作為執法的有效證據。
攝像頭安裝位置:前風擋
視頻顯示:內后視鏡
對攝像頭性能要求:行車記錄儀用的基本都是小焦距鏡頭,焦距一般在2.8mm左右。目的是為了遠處和近處都可以調出比較清晰的圖像。
b.CMS(電子外后視鏡)
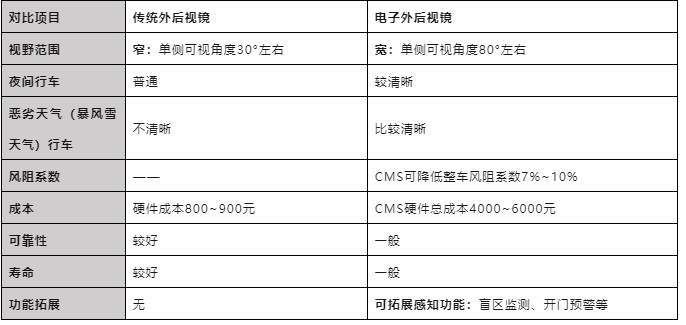
CMS(電子外后視鏡)是一套基于攝像頭和顯示屏的組合裝置來替代傳統外后視鏡。通過外部攝像頭采集圖像信息,經過數據處理后,將車輛側后方的信息顯示在座艙內的顯示屏上。另外,攝像頭還可兼顧側后方的感知功能,比如盲區監測、障礙物提示等。
圖表8. 傳統外后視鏡與電子外后視鏡對比
-
攝像頭安裝位置:外后視鏡位置
-
顯示屏安裝位置:一般在A柱附近,部分集成在門板上。
-
對攝像頭的性能要求:功能安全要求高;攝像頭分辨率一般≥2MP;動態范圍需要≥120dB;考慮到極端天氣情況,集成有加熱除霜除霧功能;對視頻傳輸的實時性有較高要求,幀率需要≥60fps。
1.3.2 艙內場景
目前,車載攝像頭在座艙內的應用主要有兩種:駕駛員狀態監測(DMS)和艙內乘員監測(OMS)。
1)駕駛員狀態監測(DMS)
基于視覺的DMS功能是通過使用布置在駕駛員前方的攝像頭來監控駕駛員,通過識別并追蹤眼部、眼球、面部以及頭部等部位的特征信息,經過算法處理后判定駕駛員是否存在分心、疲勞或危險駕駛行為,并能夠及時提醒駕駛員。
DMS攝像頭常見的安裝布置位置:方向盤中間位置/內后視鏡上方/A柱/集成于組合儀表顯示屏等。DMS 攝像頭一般使用IR近紅外攝像頭(黑白攝像頭),采用全局曝光模式,常用分辨率在1MP~5MP,水平視場角一般為40°~70°,幀率一般≥30fps。
圖表9. DMS攝像頭安裝位置示意圖

2)艙內乘員監測(OMS)
基于視覺的OMS解決方案是通過攝像頭來監控座艙內的所有乘員,主要支持實現的功能包括乘客佩戴安全帶監測、車內活體檢測(下車后,監控后排是否遺留有兒童、寵物等)等功能。
OMS攝像頭常見的安裝布置位置:內后視鏡上方、中控顯示屏上方等。OMS應用一般采用RGB-IR雙模式攝像頭,兼顧紅外面部識別和彩色圖像質量。另外,OMS攝像頭也是采用全局曝光模式,常用分辨率為2MP~5MP,水平視場角一般≥120°。
轉自焉知汽車
